Mỗi năm, có hàng ngàn người ở Châu Âu bị liệt vì tổn thương tủy sống. Nhiều trường hợp nạn nhân vẫn còn rất trẻ tuổi, đối mặt với những năm tháng còn lại của cuộc sống bị hạn chế cùng chiếc xe đẩy. Mặc dù hiện nay chưa có liệu pháp chữa trị cụ thể, nhưng trong tương lai, họ sẽ có thể đi lại được nhờ sự giúp đỡ của Khung Xương Robot điều khiển bằng ý thức, sản phẩm được phát triển bởi nhà khoa học do quỹ EU (Châu Âu) tài trợ
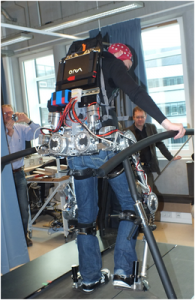
Hệ thống của khung xương dựa trên nền tảng kỹ thuật mới BNCI (Brain-neural-computer interface) – kết hợp với một khung xương nhẹ được gắn vào chân người sử dụng và một môi trường thực tế ảo dành cho việc luyện tập. Hệ thống có thể ứng dụng trong việc phục hồi chức năng cho nạn nhân đột quỵ và hỗ trợ những nhà du hành vũ trụ khôi phục khối cơ bắp sau thời gian dài ở trên không gian.
Tại Vương Quốc Anh, mỗi 8h lại có người bị tổn thương tủy sống, thường dẫn đến liệt cục bộ ở phần thân dưới. Tại Mỹ, có hơn 250.000 người hiện đang sống chung với căn bệnh liệt do chấn thương tủy sống, thường là hậu quả của tai nạn giao thông, ngã hay chấn thương trong thể thao. Nhiều người có tuổi đời dưới 50 trong tình trạng không có thuốc chữa hay các liệu pháp phục hồi tổn thương ở thần kinh của cột sống. Họ phải đối mặt với cuộc sống gắn liền cùng chiếc xe lăn.
Nhưng với việc bỏ qua tủy sống, hướng tín hiệu của sóng não đi đến bộ khung robot, họ sẽ có thể trở lại với đôi chân của mình. Đó chính là mục tiêu tối cao của nhóm các nhà nghiên cứu làm việc với đề tài “Mind-controlled orthosis and VR-training environment for walking empowering” ( Mindwalker – tạm dịch : Khung điều khiển bằng ý thức và môi trường luyện tập thực tế ảo cho phép đi lại”- sáng kiến được tài trợ 2.75tr EUR từ Hội Đồng Chung Châu Âu.
Michel llzovitz, người phối hợp của đề tài tại Ban Ứng Dụng Không Gian tại Đức, cho biết: “Mindwalker đã được đề xuất như một đề tài đầy tham vọng. Đề tài này hướng đến việc khám phá những cách tiếp cận nhằm khai thác tín hiệu não bộ để điều khiển khung robot cao cấp. Đồng thời thiết kế và bổ sung thêm một hệ thống nguyên mẫu, biểu diễn năng lực tiềm tàng của các công nghệ liên quan”.
Hướng tiếp cận của nhóm dựa vào hệ thống BNCI cấp cao, cho phép chuyển hóa các tín hiệu electroencephalography (EEG – điện não đồ) từ não hoặc tín hiệu electromyograpgy (EMG – điện cơ đồ) từ cơ vai , thành mệnh lệnh điện tử để điều khiển bộ Khung Xương gắn ngoài. Hình ảnh cụ thể hóa của 2 loại tín hiệu này được biểu diễn trong ảnh.

Phòng nghiên cứu về Khoa học Thần Kinh và Chuyển Động của Máy Sinh Học ( Neurophysiology and Movement Biomechanics) tại trường ĐH Libre de Brussel ( ULB) đã tập trung vào việc khai thác những tín hiệu EEG và EMG từ mạng neuron nhân tạo. Trong khi Học Viện Santa Lucia ( Foundation Santa Lucia) tại Ý thì phát triển kỹ thuật dựa trên tín hiệu EMG ( đã được mô hình hóa bởi khớp nối thần kinh và máy dao động sinh học)
– Phương pháp tiếp cận đầu tiên đó là sử dụng phương pháp “ steady-state visually evoked potential” ( tạm dịch: kích thích tiềm năng ở trạng thái bền vững một cách trực quan). Đó là phương pháp đọc những kích thích thị giác rất nhỏ ( chập chờn ) được tạo ở các tần số khác nhau để gây ra những tín hiệu EEG tương quan với nhau. Việc phát hiện tín hiệu EEG thường được dùng để đưa ra những mệnh lệnh như “Đứng”, “ Bước”, “ Nhanh hơn” hoặc “ Chậm hơn”.
– Phương pháp tiếp cận thứ 2 là dựa trên việc xử lý tín hiệu EMG được tạo ra bởi vai người sử dụng và khai thác sự phối hợp tự nhiên giữa tay và chân khi bước đi của con người: Những mẫu di chuyển của tay có thể được ghi nhận và chuyển thành tín hiệu điều khiển để đưa mệnh lệnh cho bộ chân của khung xương.
– Phương pháp tiếp cận thứ 3, “ ideation” ( sự hình thành suy nghĩ), cũng dựa trên việc xử lý tín hiệu EEG. Phương pháp này sử dụng kỹ thuật nhận dạng và khai thác tín hiệu vỏ não EEG Theta, được tạo ra bởi sự quá trình phát triển tinh thần tự nhiên ( natural mental process)khi bước đi. Phương pháp này đã được thử nghiệm bởi nhóm Mindwalker nhưng sau đó đã phải từ bỏ vì độ khó và thời gian cần thiết để nghiên cứu chuyển đổi các kết quả thí nghiệm trước sang một hệ thống hoàn thiện có thể khai thác được.
Bỏ qua việc sử dụng phương pháp nào, thì tín hiệu BNCI đều cần phải được lọc và xử lý trước khi điều khiển bộ khung xương gắn ngoài. Để làm được điều đó, nhóm nghiên cứu Mindwalker đã cho tín hiệu chạy qua “Dynamic recurrent neural network” (DRNN) – tạm dịch: mạng lưới động lực neuron định kỳ/ hồi quy – là một kỹ thuật xử lý cho phép tìm hiểu và khai thác đặc tính động lực học của tín hiệu BNCI.
Ông llzkovitz cho biết “ Đây là kỹ thuật hấp dẫn với ngành điều khiển động lực và cho phép điều khiển bộ khung xương tự nhiên và mượt mà hơn”.
Nhóm cũng lựa chọn một phương pháp tiếp cận thực tiễn tương tự cho việc thu thập tín hiệu EEG từ da đầu người dùng. Phần lớn hệ thống BNCI nếu không gây rắc rối cho người dùng bằng việc sử dụng các điện cực gắn trực tiếp vào tổ chức não thì lại buộc người dùng phải đội một thiết bị đặc biệt lên đầu. Cùng với đó là các thủ tục để làm thiết bị vừa khít đầu người dùng, tốn nhiều thời gian và sử dụng gel đặc biệt để giảm điện trở tại bề mặt tiếp xúc giữa da và điện cực. Mặc dù các hệ thống đó cung cấp tín hiệu với chất lượng và tỉ số chuyển hóa tín hiệu thành nhiễu ( noise) rất tốt thì chúng cũng ko đủ tính thực tiễn để sử dụng trong cuộc sống hàng ngày.
Nhóm Mindwalker, do đó, đã chuyển qua sử dụng công nghệ “khô” được phát triển bởi Berlin-based eemagine Medical Imaging Solutions( Giải pháp hình ảnh hóa y khoa) : gồm một mũ được bọc bởi các điện cực mà người dùng có thể tự điều chỉnh cho phù hợp, cùng một thiết bị điện tử tiên tiến để khuyếch đại và tối ưu hóa tín hiệu trước khi gửi đến mạng lưới neuron ( neural network )
Ông llzkovitz cho biết “ Chiếc mũ EEG có thể được đội vào đầu người thí nghiệm một cách dễ dàng bởi chính họ chỉ trong dưới 1 phút, như là một chiếc mũ bơi vậy thôi”.
<Còn tiếp >
Người dịch: Trungmaster5, theo Sciencedaily
Tài liệu công khai của dự án:
Click here
Link đến dự án :
https://www.mindwalker-project.eu/
http://cordis.europa.eu/projects/rcn/93837_en.html