※Ảnh nguồn: Festo
Robot BinonicKangaroo của Festo là một trong những sản phẩm mới, góp mặt thêm vào “sở thú” gồm các robot cơ năng học (bionic) vốn rất ấn tượng của công ty. Trong đó có: hải âu cơ năng học, chuồn chuồn, cánh cụt biết bay (flying penguins), vòi voi và cả một hệ thống sinh vật biển đa dạng.
Cũng như các robot khác, chú robot mang hình dạng của loài động vật nối tiếng tại Úc với một chiếc túi trước ngực này được phát triển bởi Mạng Nghiên Cứu Cơ Năng Học (Bionic Learning Network) của Festo. Điểm đặc biệt là nó có khả năng dự trữ năng lượng khi ở trạng thái tiếp đất sau một cú nhảy và sử dụng năng lượng đó hiệu quả trong cú nhảy tiếp theo. Công nghệ này có thể là chía khóa để tạo ra những cỗ máy có hiệu suất năng lượng cao dựa trên kỹ thuật nén khí và truyền động điện.
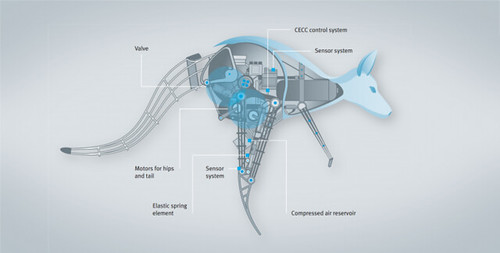
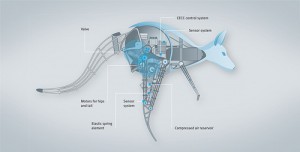
Robot BionicKangaroo sử dụng một động cơ khí nén, cho phép tạo ra lực đẩy trong các cú nhảy, đồng thời hấp thụ xung chấn khi tiếp đất. Lượng khí nén cần thiết được cung cấp hoặc từ một máy nén nhỏ hoặc từ thiết bị trữ khí nén cao áp được tích hợp sẵn. Các động cơ điện được sử dụng để duy trì cân bằng và điều khiển vị trí của kangaroo với độ chính xác cao, ví dụ như tối ưu hóa cử động của đuôi và eo hông. Tất cả các thành phần điện đều được cung cấp năng lượng từ pin sạc lithium-polymer.
Với cấu trúc nhẹ (tổng trọng lượng chỉ 7kg), kết hợp với cơ chế nhảy hiệu quả và ổn định, được kiểm tra thường xuyên bởi hệ thống điều khiển tích hợp, robot với chiều cao đến 1m này có thể nhảy xa đến 0.8m, và nhảy cao đến 0.4m. Nhưng khác với những con Kangaroo trong thực tế, những con kangaroo robot cỡ lớn có thể nhảy đến gần 12m, nhờ vào một loại dây chằng được gọi là dây chằng Achilles (Achilles tendon). Đó là một loại dây chằng mô phỏng sử dụng lò xo đàn hồi làm từ cao su.
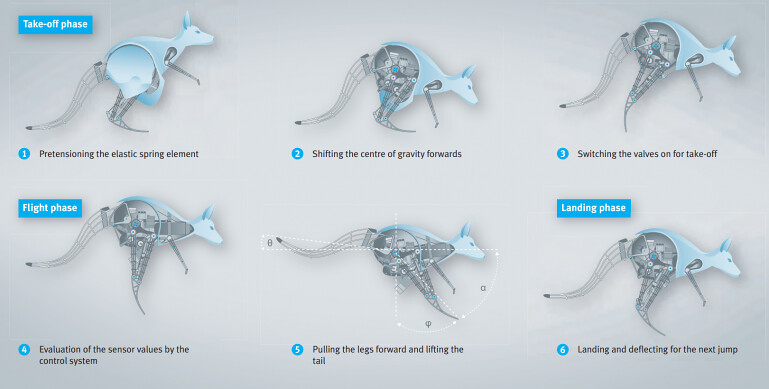
Chức năng của loại dây chằng nhân tạo này chính là để làm giảm gánh nặng cho cú nhảy và hấp thụ năng lượng động năng khi tiếp đất. Trước cú nhảy đầu tiên, nó sẽ bị ép bằng khí nén và kangaroo bắt đầu nghiên về phía trước, đồng thời thay đổi trọng tâm. Khi đạt góc nghiêng tối ưu, nó sẽ được giải phóng, tạo thành lực đẩy kangaroo nhảy lên, đẩy hai chân về phía trước và nâng đuôi lên. Tại trạng thái này, hệ thống điều khiển của robot sẽ đảm bảo đôi chân ở vị trí đủ cao, bao phủ bề mặt đất lớn nhất có thể, và cử động của đuôi đủ để bù lại ngẫu lực xuất hiện ở vùng eo. Qua đó giữ cho phần thân trên của robot có thể hướng theo chiều ngang nhiều hoặc ít hơn trong suốt quá trình nhảy.
Thế nhưng, phép màu thực sự là khi robot tiếp đất, dây chằng sẽ bị nén lại một lần nữa, và động năng được chuyển thành thế năng,dự trữ trong hệ thống để chuẩn bị cho cú nhảy tiếp theo. Ở trạng thái này, chiếc đuôi sẽ trở lại vị trí như ban đầu. Bằng cách chuyển tiếp năng lượng trực tiếp sang cú nhảy tiếp theo và điều chỉnh từng cú nhảy trong thời điểm chính xác, BionicKangaroo có thể nhảy liên tục vài cú một lúc mà không cần tiêu tốn quá nhiều năng lượng. Để dừng lại, robot sẽ hấp thụ năng lượng nhiều nhất có thể và ép dây chằng nén lại.
Với robot này, mục đích của Bionic Learning Network khá rõ ràng, đó là nghiên cứu tự nhiên để nâng cao tự động hóa công nghiệp. Việc tạo ra các robot động vật với thiết kế ấn tượng có lẽ chỉ là một “phản ứng phụ” ngoạn mục mà thôi. Ví dụ, với các giải pháp về năng lượng được phát triển cho robot hải âu của Festo đã được áp dụng trong hệ thống thu thập năng lượng gió chả hạn. Mục tiêu chính của dự án BionicKangaroo kéo dài hai năm này chính là nghiên cứu xem làm thế nào để tạo ra một hệ thống linh hoạt, hiệu suất năng lượng cao và kết hợp các thành phần khí, điện học, cho phép thu nạp, dự trữ và tái sử dụng năng lượng khi cần.
Tất nhiên, với mục đích như vậy, những người hâm mộ sẽ khó có thể tiếp cận với một phiên bản thương mại hóa chính thức của BionicKangaroo. Thế nhưng biết đâu đấy, có thể một phiên bản với kích thước lớn hơn kèm một bộ yên cương sẽ thay đổi toàn bộ bộ mặt giao thông trong một ngày nào đó thì sao? Mặc dù số phận phía trước của BionicKangaroo vẫn còn chưa rõ ràng, nhưng ít nhất thì nó đã được trình diễn trước công chúng trong hội chợ Hannover Messe vào tháng 4 năm nay.
Bạn có thể tìm hiểu thêm về robot trong clip bên dưới để thấy BionicKangaroo thậm chí còn có thể tự thay đổi vị trí theo cử chỉ của người sử dụng thông qua thiết bị MYO armband. Công bố của nhóm nghiên cứu đã được đăng trên tạp chí IEEE Spectrum.
Biên dịch: Trungmaster, theo Gizmag


