
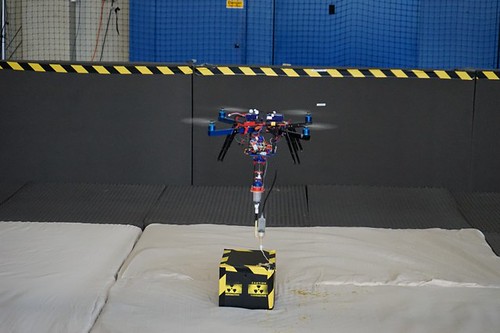
※ Ảnh nguồn: Aerial Robotics Lab
Chim yến trong tự nhiên không khác nhiều lắm so với các loài chim nhỏ khác, thế nhưng chúng lại có một khả năng vô cùng độc đáo- đó là chúng xây tổ bằng chính nước dãi của mình . Lấy cảm hứng từ loài chim này, các nhà khoa học tại phòng nghiên cứu Robot Trên Không (Aerial Robotics) của trường Imperial College London đã tạo ra một robot có hình dạng trực thăng bốn trục (quadcoper), có thể vừa bay vừa phun bọt xốp polyurethane. Bằng cách xác định vị trí phun bọt, thiết bị này có thể tạo ra các cấu trúc đơn giản, mang tiềm năng của một máy in 3D trên không. Công nghệ này có thể sẽ có rất nhiều ứng dụng quan trọng trong tương lai.
Được phát triển bởi ông Graham Hunt và các thành viên khác trong một nhóm dẫn dắt bởi Tiến Sĩ Mirko Kovac, nền tảng cơ bản của robot được làm từ các thành phần in 3D với chi phí khá rẻ, và các giá đỡ bằng sợi carbon. Phía dưới robot có hai hộp bằng kim loại chứa các dung dịch hóa học khác nhau. Khi hai dung dịch này được trộn lẫn ở đầu phun, phản ứng hóa học sẽ xảy ra và tạo thành bọt xốp.
Với thiết kế hiện nay, thiết bị sử dụng GPS và hệ thống gắn ngoài gồm 16 camera hồng ngoại để xác định đối tượng bắn bọt xốp trong phạm vi phòng thí nghiệm. Các dữ liệu từ cảm biến sẽ được truyền đến một máy tính xách tay gần đó, bổ sung thêm các dữ liệu (phần bù) về góc độ thay đổi liên tục à khối lượng của tải trọng in trên robot. Dựa vào các dữ liệu đã qua xử lý, máy tính sẽ phản hồi lệnh trở lại robot để tiến hành phun một cách chính xác.
Trong tương lai, nhóm nghiên cứu của Kovac hy vọng có thể tạo ra những thiết bị UAV hoàn toàn tự động, trang bị camera tốc độ cao (hight-speed camera) và cảm biến chiều sâu 3D, để thực hiện các nhiêm vụ trong điều kiện thực, hỗn loạn… khác nhau.
Ví dụ, chúng có thể được sử dụng trong các ứng dụng như tiến hành sửa chữa, tái xây dựng trong các khu vực quá xa hoặc quá nguy hiểm đối với con người, như các turbine gió hoặc lò phản ứng nguyên tử chả hạn. Hoặc chúng cũng có thể được sử dụng để nhặt và phá các đồ nguy hiểm như bom, rác thải phóng xạ… Nhóm nghiên cứu đã chuẩn bị một robot khác cho những công việc như vậy.
Đó là một trực thăng sáu trục (hexacopter), và thay vì mang một hế thống phun bọt, thì nó mang một bề mặt phẳng dùng một lần ở mặt dưới. Sau khi robot đầu tiên (trực thăng bốn trục) phun bọt lên đối tượng, robot này sẽ đáp xuống bề mặt đối tượng. Khi lớp bọt ướt bám dính vào mặt phẳng, robot sẽ bay lên và mang theo cả đối tượng đó.Hiện tại chiếc trực thăng sáu trục này có thể mang được khối lượng khoảng 2.5kg, và theo tính toán nếu được tăng kích thước, nó có thể mang tới 40kg.
Tiến Sĩ Kovac đã hình dung về một hệ thống hoàn chỉnh lấy cảm hứng từ sinh vật. Trong đó, một “bầy” các robot hoang dã có thể tự động xây dựng các nền tảng mà chúng có thể sử dụng làm căn cứ hoạt động, hoặc nạp năng lượng (thông qua các tấm pin mặt trời được tích hợp sẵn). “Cũng giống như trong tự nhiên, các robot sẽ có các chức năng đặc biệt, khác nhau, từ đó phân công lao động khác nhau,” Ông giải thích, “Bằng cách sử dụng hoạt động của bầy đàn, robot có thể thực hiện nhiều nhiệm vụ phức tạp trong việc kiểm tra độc lập và xây dựng trên không một cách hiệu quả. Ví dụ, một bầy những “con” làm nhiện vụ kiểm tra sẽ quét 3D để xác định những nguy hiểm tiềm ẩn trong môi trường và một bầy khác làm nhiệm vụ xây dựng sẽ sửa chữa các cấu trúc thích hợp bằng công nghệ in 3D trên không.”
Robot trực thăng bốn trục này đã được trình diễn trong Festival của trường, và nghiên cứu được công bố chính thức tại Hội Nghị Quốc Tế về Robot và Tự Động Hóa (International Conference on Robotics and Automation) tại Hồng Kông.
Bạn có thể tìm hiểu thêm về robot này trong clip dưới đây:
Biên dịch: Trungmaster, theo Gizmag


